L’année 2017/2018 aura été celle de la résurrection du blog UTCoupe (et de beaucoup d’autres choses), mais ce magnifique outil aura assurément été sous utilisé par rapport à son potentiel (bien qu’à mon avis, les lecteurs du blog ne se bousculent pas au portillon…). J’ai écrit quelques billets durant le semestre, avec comme idée de pouvoir stocker notre avancement et garder un historique plus utile et fiable que les divers postes sur la page facebook d’UTCoupe. J’aurais aimé pouvoir alimenter le blog durant la coupe, malheureusement le temps m’a manqué. Je vais donc prendre le temps, maintenant que j’en ai, pour vous conter le récit d’une grande aventure, celle d’UTCoupe à la coupe de France de robotique édition 2018 ! Alors accrochez-vous, parce que ça va être long, mais palpitant, plein d’émotions et de belles photos pour rendre ce billet encore plus majestueux. Parce que bon, blague à part, on le mérite bien, même si le classement n’était pas au rendez-vous (damn, spoiler alert !!).
04/05/2018 : J-5 : que l’aventure commence !
Bon, mettons-nous d’accord, le titre est un peu provocateur, on a commencé l’aventure et a fortiori, à bosser, bien avant. Mais bon, il fallait bien commencer quelque part, et 5 jours avant le début de la coupe, c’est déjà pas mal^^ La vraie question, c’est pourquoi avoir commencé le vendredi avant la coupe ?
La réponse est en substance extrêmement simple, c’est le vendredi avant la coupe que tout a commencé pour de vrai. Je parle bien évidemment des emmerdes qu’on a rencontrées tout au long de cette petite période de rush ! Parce que vous allez voir, les emmerdes, c’est le fil rouge de notre coupe de cette année (comme tous les ans, non ?).
Un petit souci avec la base roulante du gros robot…
Premier nominé au rang des emmerdes bien emmerdantes, j’ai nommé, la base roulante du gros robot ! Ou plus exactement la plaque usinée en jet d’eau de 6mm d’épaisseur sur laquelle se fixe la base roulante du robot et qui permet, acier 6mm oblige, de lester et d’abaisser grandement le centre de gravité du robot (c’était quelque chose qu’on n’a pas eu le temps de faire en 2017, résultat le robot avant quelques soucis à de déplacer, notamment il arrivait assez facilement à faire des wheeling (soit dit en passant, c’était stylé, mais pas forcément une bonne idée pendant les matchs^^)).
Bref, quelques jours avant, nous avons pris contact avec l’entreprise DRD Industries (qui ne se situe vraiment pas loin de notre local) afin d’usiner en découpe jet d’eau la base roulante du petit et du gros robot, en acier 6mm. Finalement le retard accumulé sur la base du petit et l’impossibilité d’y rentrer les billes de stabilité (on a eu le même souci l’an dernier sauf qu’Antoine a été assez courageux et assez fou pour faire des lamages dans la plaque d’acier 6mm, on passera sur les détails de l’opération, ce sont de mauvais souvenir dont je ne préfère pas me souvenir^^) ont fait que nous avons seulement lancé l’usinage sur la plaque du gros robot. Vendredi est le jour où nous avons pu la récupérer. Et c’est là que le drame commence !
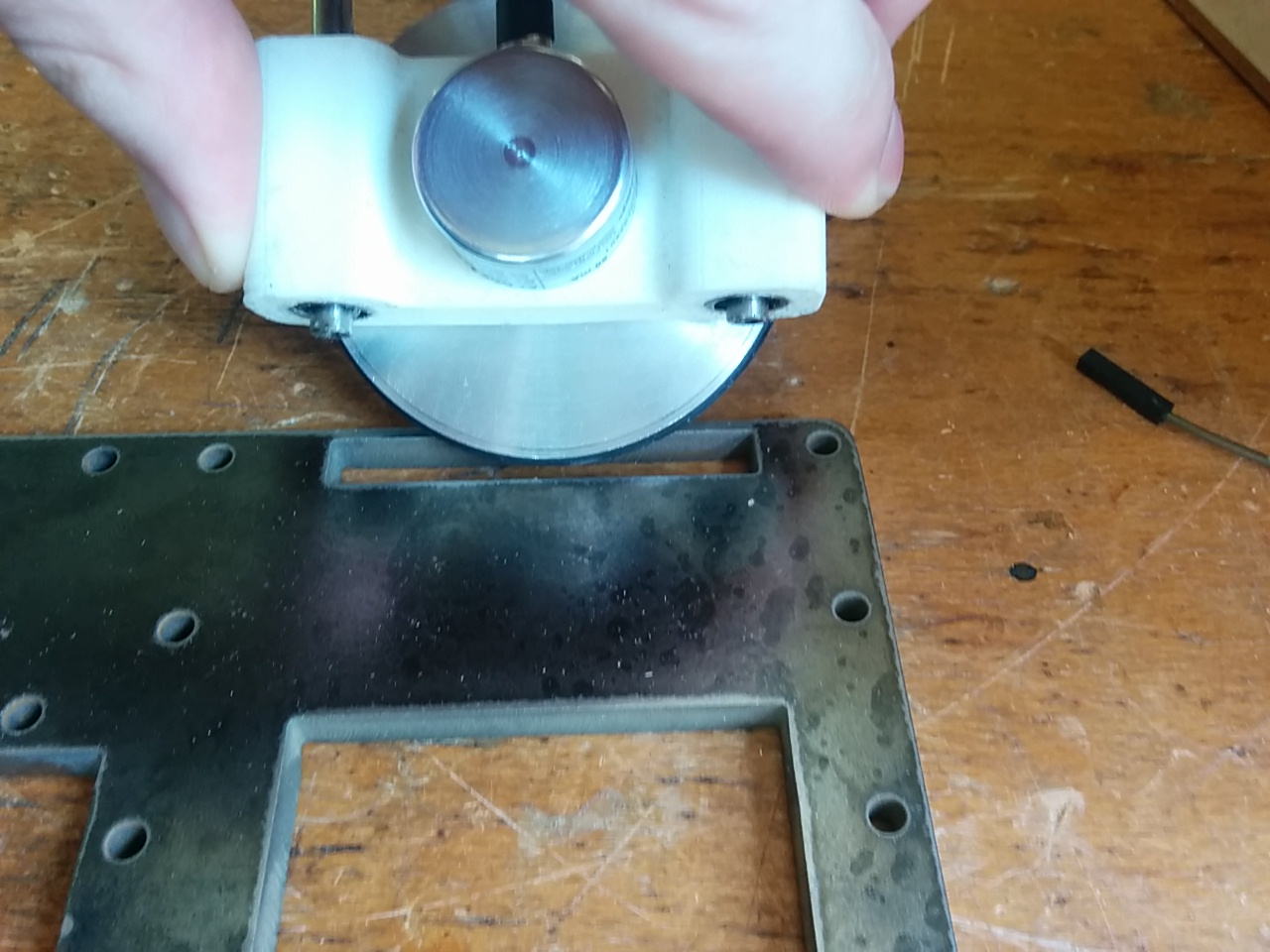
Un petit soucis pour fixer les roues codeuses…
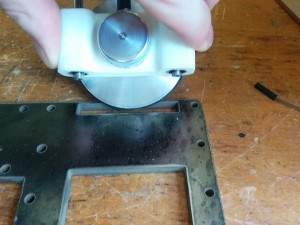
Comme vous pouvez le constater sur l’image, il manque les trous de fixation pour les roues codeuses (qui, soit dit en passant, sont vitales au bon fonctionnement du robot !)… Pour rappel, la coupe est dans 5 jours, le grand robot est actuellement inexistant et la seule partie simple, à savoir fixer la base roulante et les roues codeuses sur la nouvelle plaque, est impossible à cause de perçages manquants. Les choses commencent plutôt mal quoi^^
Bon, dans la journée, super Loïc, d’un calme exemplaire et avec un sang-froid à glacer le sang (ok, elle est naze, j’en conviens) est venu prendre quelques mesures, a embarqué la plaque au Fablab histoire de lui faire des petits trous et nous a ramené le tout le soir même. Donc plus de stress qu’autre chose 
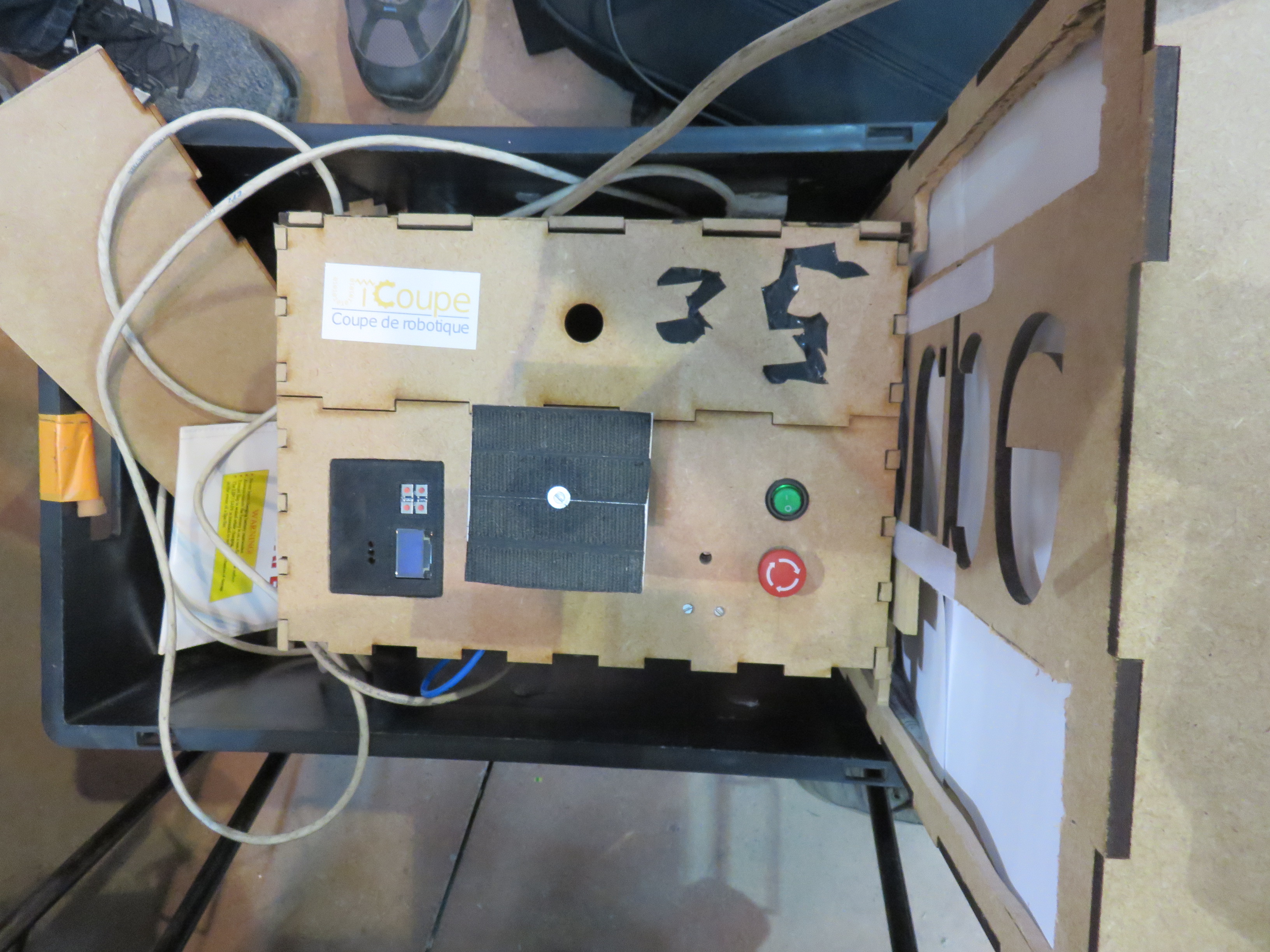
Un panneau de domotique qui a d’la gueule !
Dans un autre registre, mais toujours au programme des emmerdes, le panneau de domotique a été terminé (Mouhamed était extrêmement fier !) et il a de la gueule :

Un panneau qui a d’la gueule !
Mais tout ça, c’était sans compter sur l’intervention d’Elwan, qui était apparemment le seul à avoir lu le règlement jusqu’au bout, disant que le panneau de domotique ne pouvait pas excéder 2kg. Forcément, quand le panneau est fait en découpe laser 6mm (merci la lentille pour découper du 3mm fissurée quelques jours avant…) et qu’il est aussi grand que le nôtre, le verdict était sans appel : plus de 2kg ! (sans câble et sans batterie)
La solution pour lui faire perdre du poids ? La scie-sauteuse ! (cette technique est déconseillée pour toute autre forme de régime :p) Et c’est qui qui s’y colle ?^^

Un régime draconien
Au final, le panneau complet fait un poil moins que 2kg et pendant l’homologation statique à la coupe, ils n’ont même pas vérifié la masse du panneau… Mais bon, c’était marrant de voir Mouhamed s’acharner pour lui faire perdre du poids^^
La base roulante du gros robot : le retour !
Après toutes ces émotions on pourrait penser que la journée du vendredi est terminée, non ? Enfin j’veux dire, on a déjà eu pas mal de problèmes comme ça à gérer, le reste pour demain ! Bah en fait non^^
Après les perçages de Loïc, la base roulante du gros robot est revenue au local en fin de journée. J’ai donc pu m’attaquer à la fixation des éléments de la base roulante sur la plaque pour commencer les tests et le réglage de l’asservissement. Et là… Plus de suspens, c’est le drame ! Pourquoi ? Simple ! A votre avis, qu’est-ce qu’il se passe quand on essaye de percer des trous à la main (certes, avec une machine du Fablab, mais la position des trous à percer est faite à la main), qu’ils sont 2 et qu’ils permettent de maintenir une roue dans un petit emplacement prévu à cet effet ?
Simple ! Les trous étaient un poil décalés, résultat : la roue codeuse frotte d’un côté contre la plaque. Certes, pas à grand-chose, on parle de quelques millimètres, mais c’est quelques millimètres de trop… Solution ?

On lime, on lime, on lime…
On sort l’huile de coude, une lime et on attaque ! Ça aura pris un peu de temps, notamment parce que nous n’avions que des limes de précision au local et qu’elles n’étaient plus toutes jeunes… Mais ça aura quand même été une victoire, après une bonne demi-heure à limer, les deux roues codeuses sont passées et tournaient sans aucun frottement 
Après toutes ces émotions, il est temps d’aller se coucher. Parce que le lendemain, on attaque le dernier week end avant la coupe !
05/05/2018 & 06/05/2018 : dernier week-end avant la coupe
1 week-end, soit 2 jours, soit 48 heures, c’est pas suffisant ! Déjà, première chose, on prend ses précautions : petit tour au Leroy Merlin pour acheter une lime grossière, juste au cas où il faudrait encore limer la plaquez du gros robot :p A part ça, il y a encore énormément de boulot au programme :
- Terminer le montage de la première nouvelle version du petit robot
- Terminer la conception du carter du gros robot et de ce qui va aller dedans
- Faire les cartes électroniques des deux robots
- Souder les connecteurs pour les capteurs de la ceinture et faire les nappes qui vont avec
- Régler tous les « petits » soucis sur la partie logicielle
- J’oublie sûrement plein d’autres trucs…
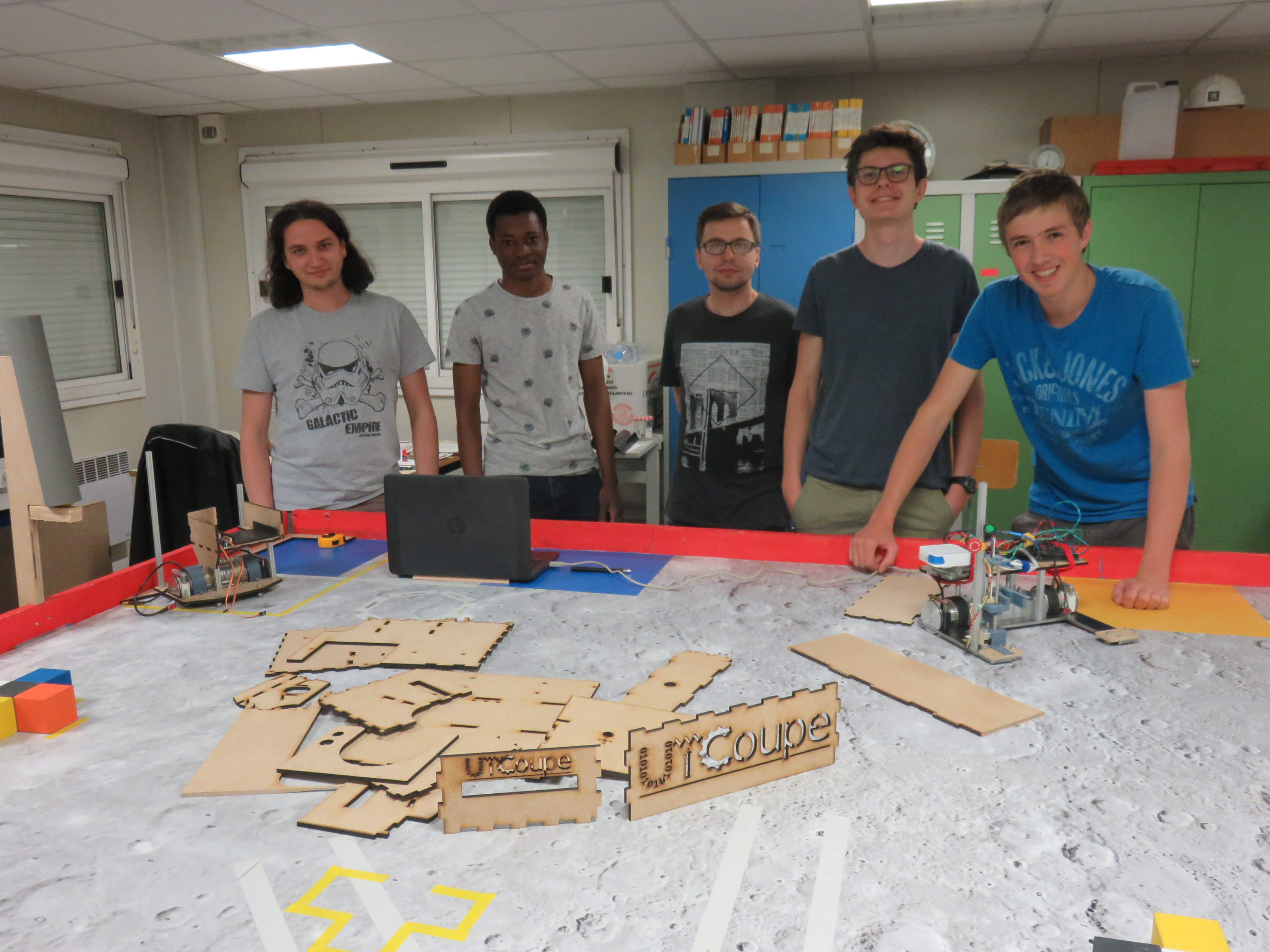
Bref, pas le temps de chômer, tout le monde avait quelque chose à faire, le local est grand, du coup, ça donne un truc comme ça :

Ça boss dure !
On peut apercevoir Gaëtan au fond, en train de limer…
La base roulante du gros robot : épisode 3 !
Acheter une nouvelle lime spéciale pour dégrossir, idée de génie, flair ou coup de chance ? Je vous laisse décider, mais il n’empêche que c’était une très bonne idée de l’acheter ! Pourquoi vous demandez-vous ? Les roues codeuses passent, pour quelle raison continuer à limer ??
Simple ! Si vous avez une plaque dédiée pour fixer les éléments de votre base roulante et que les roues codeuses peuvent être fixées, la question à 200€ est : quel est l’autre élément vital qu’il faut encore fixer ? Les roues motrices !!
Eh oui, les roues motrices non plus ne passaient pas dans la nouvelle base, tant en longueur qu’en largeur et là, c’était pas 2/3mm qui manquaient… Du coup, on s’est fait un petit relais pour limer la plaque, même si Gaëtan en aura quand même fait la plus grosse partie.
On passera aussi sur les trous manquants pour fixer la base roulante, vu que d’autres trous étaient prévus et qu’on a pu fixer la base sans problème. Mais je mentionne quand même, juste parce que ça me fait plaisir :p Et qu’il faut bien remplir cette section !
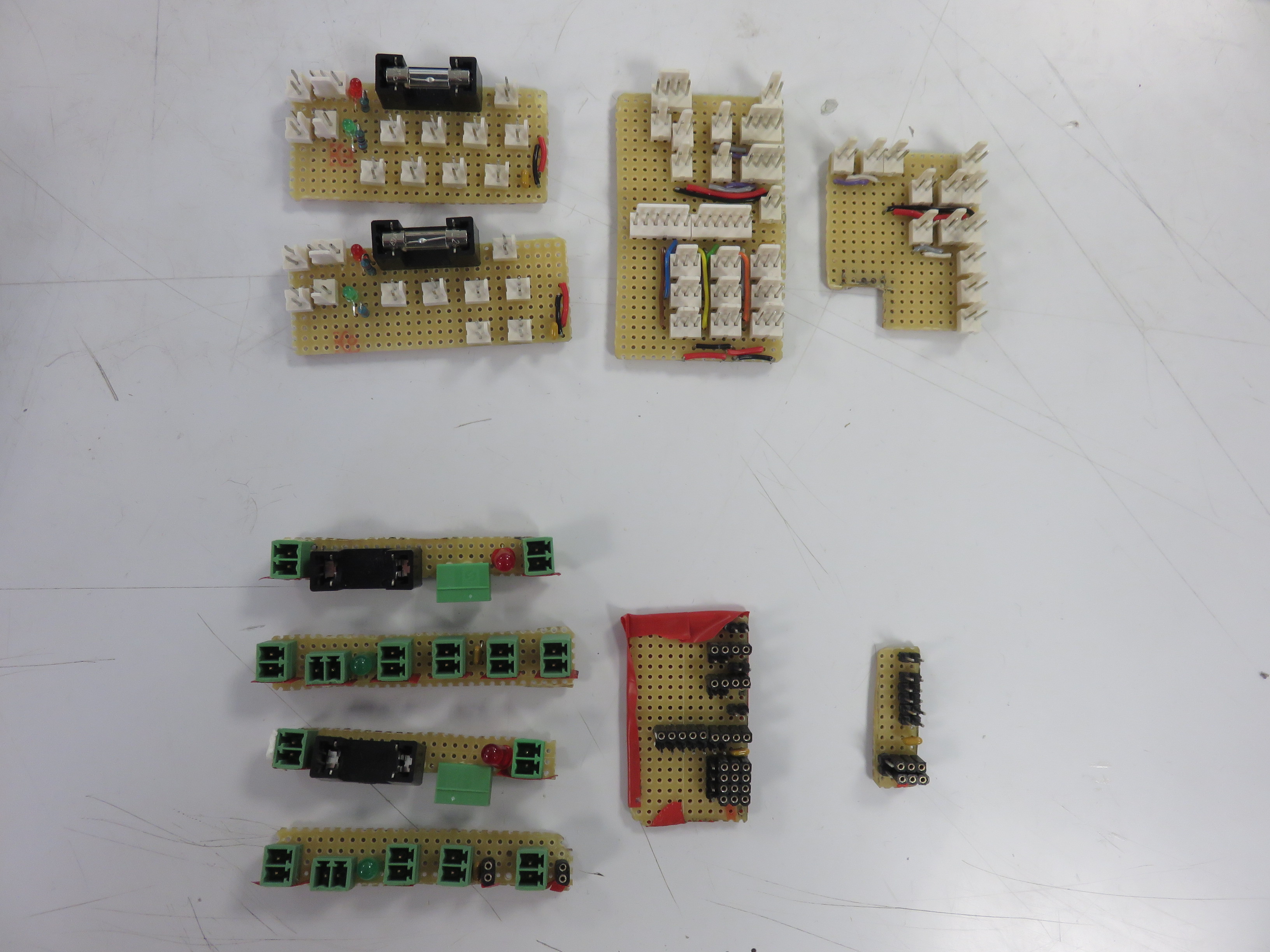
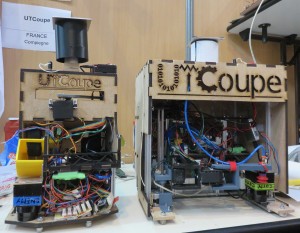
Une électronique à la pointe
J’ai de mauvais souvenirs de l’an dernier qui me remontent… Des souvenirs d’une électronique faite à la va vite, avec des connecteurs pas forcément prévus pour ça, des sueurs froides en match à cause des nombreux faux-contacts, bref, c’était la merde ! Cette année, pas question de se faire avoir une deuxième fois (l’expérience peut-être :p), du coup, on a acheté des super connecteurs avec attache incorporée sur les mâles et des femelles serties, comme ça, plus d’emmerdes, on aura une plateforme élec stylée (moins que celle de l’UTT, faut bien l’avouer (désolé, j’ai pas de photo sous la main)).
De fait, tout a été commandé un peu retard, si on ajoute les délais pour le paiement (matériel gracieusement offert par le département du GI) et l’envoi, c’était juste ! Donc tout a commencé (et s’est presque terminé) durant le week end. La finalité, c’est des cartes plus grandes et beaucoup plus stylées que l’an dernier :

Nouvelle plateforme élec
Après j’en parle comme si on avait un truc monstrueux et tout, mais les cartes font simplement de la distribution de puissance et du routage de signaux, rien d’extraordinaire en soit. Vu que toute l’électronique de calcul est déportée sur des Arduino, il reste pas grand-chose à faire (et c’est précisément pour cette raison qu’on a fait ce choix !).
J’ai pas grand-chose de plus à vous raconter sur le week end, il y a eu beaucoup de boulot, plein de trucs ont été terminés, plein d’autres attendaient l’ouverture du Fablab lundi et le reste, ma foi, on verra plus tard :p
07/05/2018 : J-2 : fabriquer des robots en 24h ? Challenge accepted !
Lundi 7 mai 2018 : le jour le plus important du semestre, voire de l’année universitaire ! Pourquoi ? Parce que c’était le dernier jour ouvré avant la coupe !!! Les implications sont assez énormes : dernier jour d’utilisation du Fablab, dernier jour d’accès au labo pour emprunter du matériel, dernier jour d’accès aux magasins. Bref, très grosse journée !
Note concernant le titre un poil provocateur : lundi matin, tout ce qu’il existe du gros robot, c’est une CAO non achevée, une plaque d’acier où était fixé la base roulante et les roues motrices et c’est à peu près tout… Quoique, on avait déjà le bras et une partie de l’actionneur principal, mais rien de monté dans le robot. Et concernant le petit, une première nouvelle version a été montée durant le week-end, mais dans la mesure où cette version était complètement inutilisable, je préfère considérer qu’à part l’ancien proto, on n’avait rien du tout pour le petit non plus.
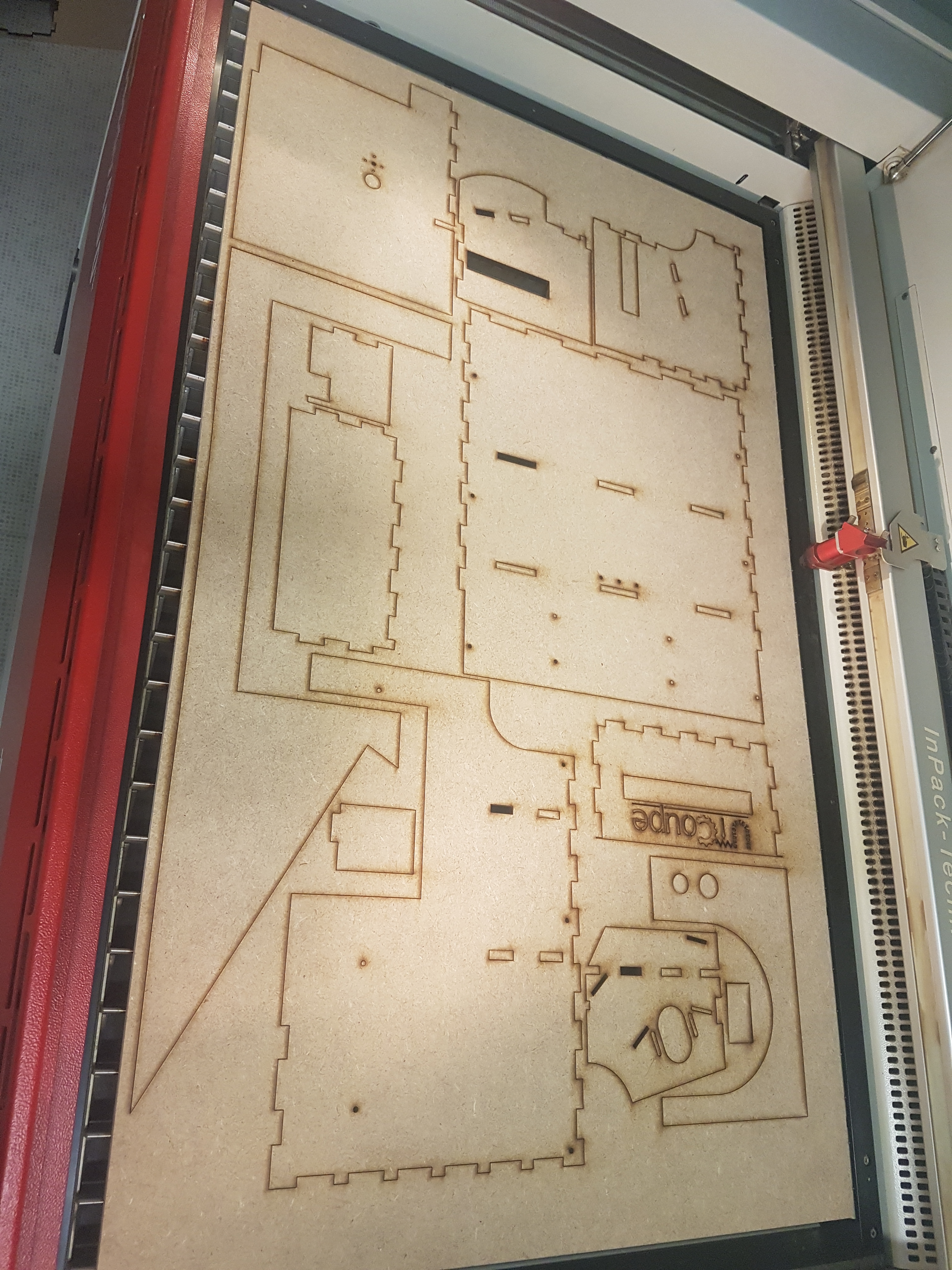
De la CAO à la découpe laser
Depuis 2013, l’UTC dispose d’un Fablab avec des machines swag (on avait déjà le Fablab avant, mais avec un tout petit local et pas de matériel (on en avait plus qu’eux, c’est pour dire !)), notamment une armée d’imprimantes 3D et aussi la sacro-sainte découpeuse laser ! Ce petit bijou technologique permet de découper, quand les étoiles sont alignées et qu’on n’est pas proche de la coupe (j’y reviendrai), des plaques de bois ou de plexi jusqu’à 10mm d’épaisseur. Et c’est le moyen d’usinage utilisé par UTCoupe depuis 2013 pour fabriquer ses robots (c’est devenu plus ou moins une marque de fabrique).
Bref, tout ça pour dire que le worflow habituel, comme la grande majorité des équipes et des entreprises, c’est : on fait de la CAO, on usine, on monte. L’avantage d’usiner sur du bois (oui, je parle de bois et non de papier épais/mâché/boisé comme certains appellent les plaques d’aggloméré utilisées par la découpeuse laser :p) c’est qu’en cas de plantage dans la CAO, c’est très facile à redécouper, repercer, bref, à réusiner à la main. Et c’est une aubaine, que dis-je, une nécessité absolument vitale !!! Mais avant d’être médisant envers mes collègues méca, qui auront quand même assuré et tout donné, commençons par être positif à leur égard.
Parce que oui, ils avaient un week-end pour finir la conception des robots, de sorte que lundi matin à la première heure, on aurait dû débarquer en force au Fablab et lancer l’usinage. Mais non, on est à l’UTC ici ! Faire les choses en avance, c’est pas notre crédo, on préfère attendre le dernier moment histoire d’être sûr que la pression est à son maximum et que Thomas soit au bord de l’infarctus !
Du coup, la journée du lundi a été consacrée à modifier/finaliser/améliorer la CAO des deux robots en vue de lancer l’usinage des plaques au Fablab. Sachant que dans le lot, il y avait une contrainte stricte : 22h, heure de fermeture du Fablab. Forcément, l’usinage à la découpe laser s’est plutôt terminée vers les 22h30^^ Mais le résultat est plutôt swag :
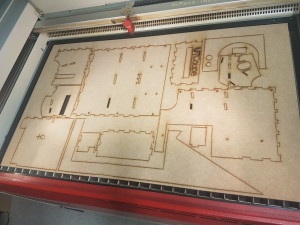
Découpe laser des deux robots
Note concernant un joyeux passif entre la découpeuse laser, UTCoupe et l’approche de la coupe :
Tant d’émotions que je ne sais pas comment aborder la chose. Nous sommes maudits ! C’est peut-être une bonne accroche^^ Oui, nous, UTCoupe, sommes maudits (ou alors on a manqué plusieurs fois de beaucoup de chance) ou alors, c’est juste que la découpeuse laser ne nous aime pas (pourtant nous on la kiff <3).
Avant d'aller plus loin, revenons en 2017, à une période tout aussi charnière, à savoir, quelques jours avant la coupe. Nous n'étions de loin pas aussi bien préparés que cette année, néanmoins à quelques jours de la coupe, la situation était quelque peu identique : un petit robot construit et un gros robot existant seulement en CAO. L'idée était la même, aller au Fablab pour lancer l'usinage du gros robot. Sauf que... La magnifique lentille (salope !) qui permet la découpe de plaques de 1 à 6mm était HS, rendant impossible les découpes en 3mm (ce dont nous avions besoin). Fort heureusement, le Fablab avait du rechange, la lentille a été changée rapidement et nous avons pu usiner nos plaques, avec quelques jours de retard néanmoins.
De retour en 2018, l'avant-veille de la coupe et accessoirement le dernier jour d'ouverture du Fablab avec le grand départ, la lentille de découpe pour le 3mm (toujours elle !) était toujours encore inutilisable (fendue 2 semaines auparavant). Il en résulte que la CAO des deux robots a dû être modifiée pour être en accord avec l'utilisation de plaques en 6mm et non en 3mm. Outre la masse plus importante c'est surtout l'encombrement, notamment sur le petit robot, qui a été un gros problème.
Forcément, l'histoire ne s'arrête pas là, la fameuse nouvelle lentille est arrivée pendant la coupe, la découpeuse était donc fonctionnelle à notre retour de La Roche-sur-Yon
Il me semble que c’est le 4ème et je l’espère dernier épisode de la base roulante du gros robot
Après toutes ces émotions concernant la découpeuse laser, revenons à nos moutons, ou plutôt nos robots. Je vous avais dit en introduction que le fil rouge de nos aventures serait les emmerdes, eh bien reprenons notre fil rouge ! Et quoi de mieux pour ça que de parler à nouveau de cette super base roulante du gros robot ?
Parce que oui ! Oui ! Après avoir passé des heures à limer, après avoir repercer des trous dans la plaque d’acier 6mm, après avoir validé le bon fonctionnement de l’ensemble, il fallait, oh Murphy en jubile, que la plaque ait été montée à l’envers ! Qui fiable aurait pensé qu’il y avait un sens pour une plaque parfaitement symétrique ? Eh bien, le point est précisément là, elle n’est pas parfaitement symétrique^^
Du coup, la base roulante a été une énième fois démontée (ainsi que les autres éléments déjà fixés), la plaque a été retournée et la base roulante a été remontée. Sauf que… Non, pas possible ?! Eh bah si ! Si ! SI !!! Le fait de changer le sens de la plaque fait qu’on a limé le mauvais sens, donc… J’vous laisse imaginer la suite, moi je n’ai plus la force d’écrire une quinzième fois qu’on a passé une bonne heure à limer cette ******* de plaque.
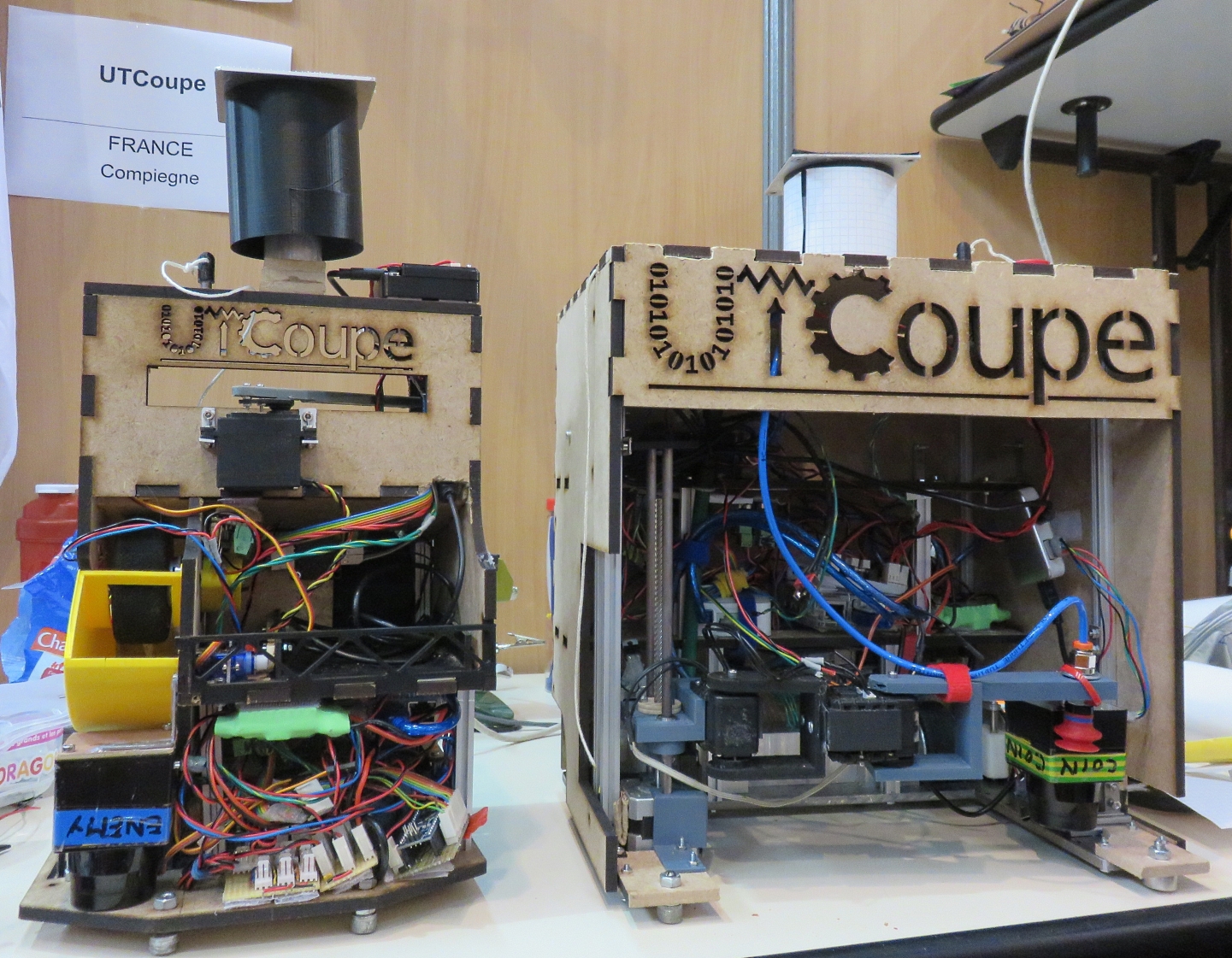
Montage des robots : à l’attaque !!!!!
Lundi 7 mai 2018, 22h45 : l’heure du crime ! Non non, c’est bon, rassurez-vous, personne n’est mort Quoique, l’équipe méca revenant dans sa quasi totalité au local après avoir bataillé au Fablab durant une bonne partie de la journée, ils étaient affamés ! Je pense qu’un troupeau y est passé, sous la forme d’une montagne de burger issus du BK, que votre serviteur est sympathiquement allé chercher (merci à François d’avoir géré les commandes !). Du coup, pause dîner :

Le réconfort après et avant l’effort !
Avant d’attaquer le montage des robots !!!
Ça en fait des plaques à monter…
On commence par le petit robot :

Montage du petit robot
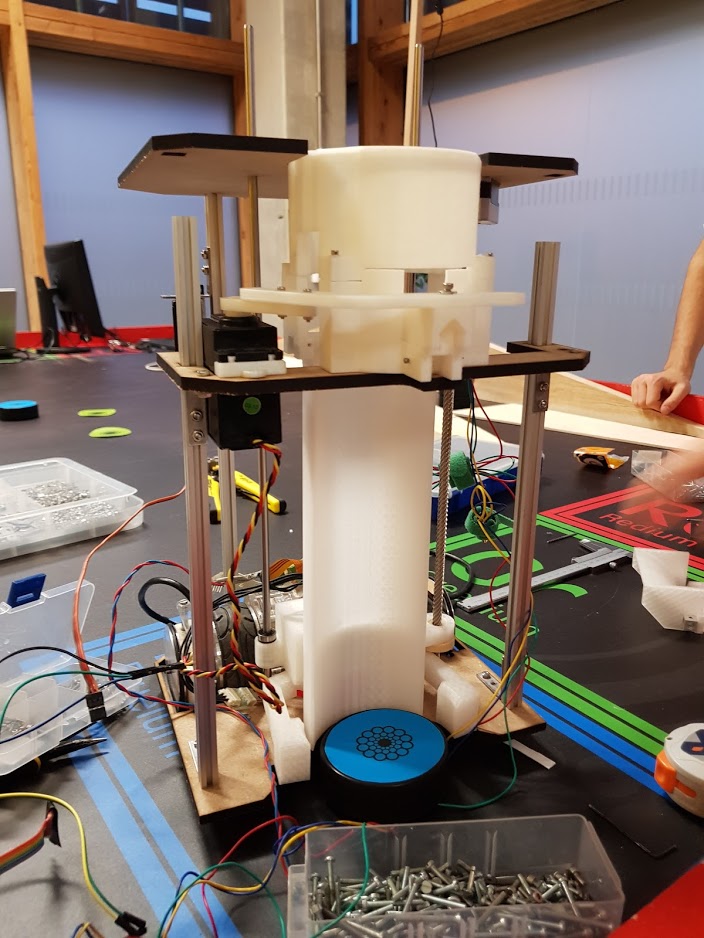
Et on continue avec le gros :

Montage du gros robot
08/05/2018 : J-1 : montage des robots et préparation au départ
Mardi 8 mai 2018, 73 années après, ce n’est pas la victoire que nous signons, mais la journée la plus productive de l’année pour UTCoupe ! La veille au soir, toutes les plaques des robots avaient été découpées et le montage avait enfin commencé. Ce mardi, la journée s’annonce chargée : monter les deux robots, les tester, préparer tout le matériel pour le départ à la coupe et enfin, charger les véhicules. Parce que le lendemain, le départ est annoncé pour… 4h et quelques ! Le réveil va piquer^^
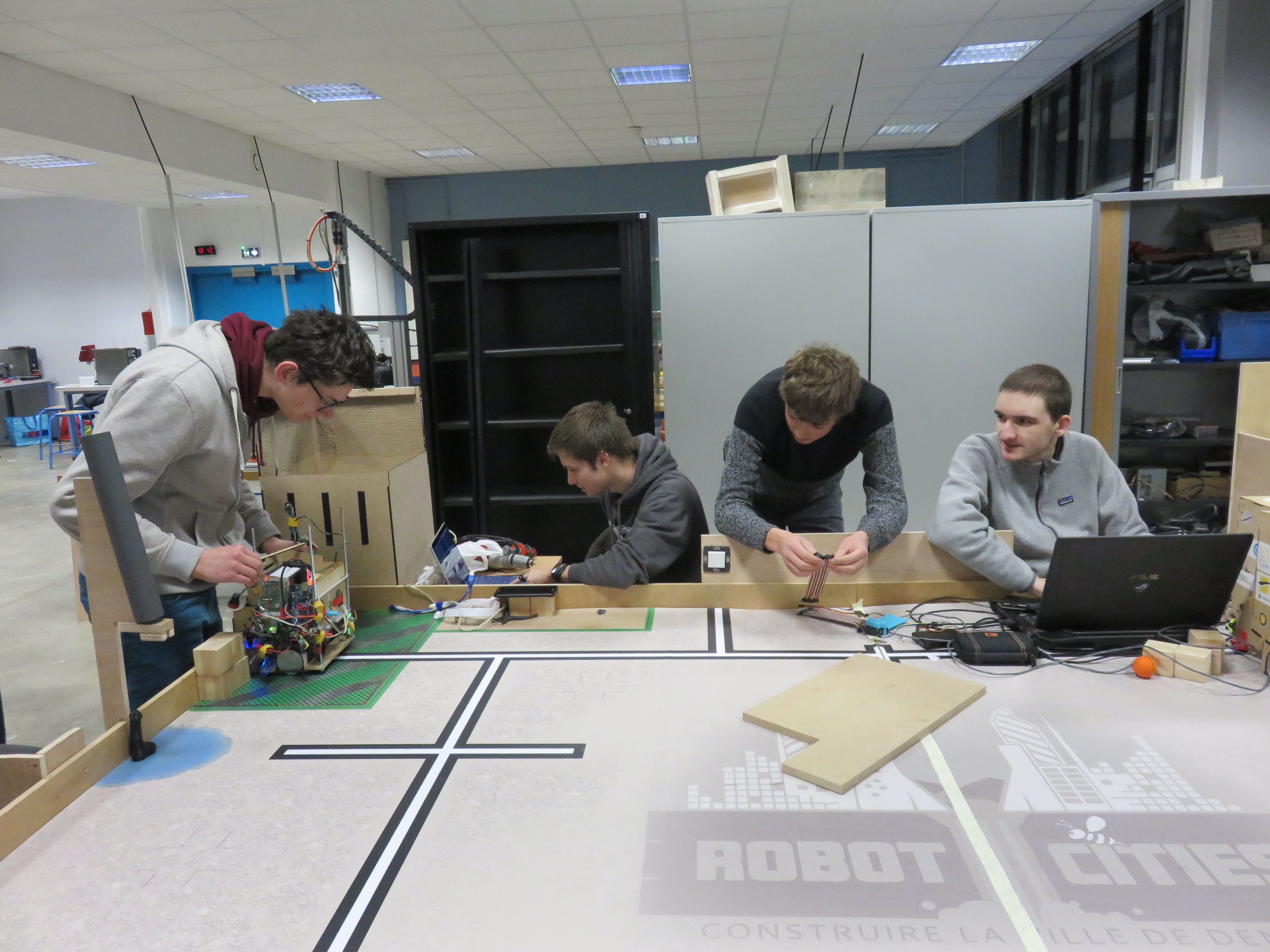
Bon, j’vais pas rentrer dans les détails de ce qu’il s’est passé cette journée-là, les premiers courageux étaient présents à 8h au local. Tout a été fait en même temps, pendant que la base roulante du gros était testée par l’info, les méca étaient sur le bras. Pendant que le petit était en cours de montage, c’est l’électronique qui était en train d’être testée. Et concrètement, ça ressemble grosso modo à ça :

Tout le monde est au taquet
Je suis sûr que là, lecteur assidu que tu es, tu es en attente de plein de détails croustillants sur comment on a merdé la veille de la coupe. Et honnêtement, j’aurai aimé te satisfaire, hélas la rédaction un poil tardive de la fin du billet aura eu un impact non négligeable sur ma mémoire :/ Mais ne doute pas que nous avons passé la journée à soupirer et à dire tout haut ce que plusieurs pensaient tout bas (du genre « ah merde, j’y avais pas pensé ! »). Mais dans l’ensemble, tout le monde s’y est mis, ça a bien avancé et à la fin de la journée, on a réussi à avoir un gros robot fonctionnel ! Le petit robot, bien que monté, a été victime de vices de montage et d’un manque de fiabilité sur sa nouvelle plateforme électronique. Mais ça, on en reparlera plus tard
Ce qu’il faut retenir c’est qu’à 21h30 c’était branle-bas de combat : plus personne ne fait rien, tout le monde range le bordel monstrueux qu’on appelait local et prépare les affaires pour la coupe. Et oui, au cas où tu te demandes, ranger est une activité qu’on sait faire ! Peut-être pas de la façon la plus efficace qui soit, mais quand même, admire :

L’équipe en mode rangement du local
A 23h heure locale, tout était prêt, les voitures étaient chargées, le local rangé, il n’y avait plus qu’à passer une bonne grosse nuit de sommeil avant le départ pour la coupe. Bref, tout était bon.
Hein, tout était bon ?! Ça sonne faux ton histoire gros ! Comment ça ça sonne faux ? Ah oui, j’oubliais^^ C’est vrai que le happy end la veille de la coupe, ça aurait été trop beau pour être vrai. Après tout, sur 4 participations à la coupe, je crois que ça ne m’est jamais arrivé. Pourquoi ça arriverait cette année ? Aucune chance…
Bref, le gros robot étant bizarrement le plus aboutis (c’est pas comme si toutes les vidéos qu’on a posté durant le semestre montraient les performances du petit…) mais la partie info ne fonctionnant pas totalement comme prévu, Alexandre et Mouhamed ont décidé de rester. Oui, vous savez, ce moment critique où vous vous dîtes : mince, ça fait 1 an que j’boss dessus comme un malade, ça fonctionne pas, la compétition commence demain, ça va pas l’faire ! (ellipse volontaire des nombreux mots fleuris^^) Un choix cornélien s’impose à l’esprit de tout le monde : dormir ou ne pas dormir. Être un vrai et passer une nuit blanche au local ou être faible et dormir 4h avant le début de la coupe ? Eh bah ces deux-là ce sont dit que ça serait une bonne idée de choisir la voie des héros. Pour l’avoir fait l’an dernier, je leur ai dit que c’était pas forcément le meilleur plan, mais bon^^
Donc à 23h, on les a lâchement abandonné dans le local pour aller profiter d’une courte mais néanmoins reposante nuit. Le réveil à 3h30 pour un départ à 4h, c’est compliqué quand même^^
09/05/2018 : Jour-J, c’est le départ !
J’avais dit quoi, le réveil à 3h30 c’est compliqué ? Oui, je confirme ! Surtout que dans l’histoire, j’me suis quand même bien fait arnaquer. Mais avant de vous parler plus en détail de l’arnaque, parlons 2 secondes de notre moyen de transport pour aller à la coupe. Parce que cette année, on y est allé à 9. 9, ça fait beaucoup de monde ! Et ça rentre pas dans 2 voitures. On avait pas 3 voitures. Donc on a décidé de faire les papas ! Parce qu’on a loué un minibus de la mort

Un moyen de transport qui en jette !
Bref, l’arnaque. La veille, quand on a chargé absolument tout le matériel dans le minibus (sans le gros robot puisque nos 2 valeureux guerriers ont travaillé dessus toute la nuit), on s’est dit que ça serait une bonne idée de ne pas laisser le minibus garé n’importe où (paraît que Compiègne ça craint^^). Sauf qu’on ne pouvait pas le laisser devant le local, puisqu’à 4h du matin, on n’avait pas les accès pour l’ouvrir. Donc on l’a mis sur le parking du CI, où le badge fonctionne h24. Sauf voilà, le conducteur du minibus habite au centre-ville. A 4h du matin, il n’y a pas de bus… Et fort heureusement, un membre de l’asso (votre serviteur, d’où l’arnaque et la présence de toute cette histoire ici même) habite juste à côté du CI. Du coup, c’est simple, il se réveil plus tôt que les autres, récupère le minibus, va à Roberval avec pour récupérer tout le monde et on revient au local récupérer le robot, 2 membres en fin de vie et la deuxième voiture. Bref, une arnaque !
Sinon pour en revenir à nos deux lascars ayant veillé toute la nuit (enfin c’est relatif, est-ce qu’on peut considérer que de minuit à 4h du matin, il s’agisse de toute la nuit ?) dans l’espoir de rendre fonctionnel le gros robot, il s’est passé ce qui, selon Murphy, est censé se passer dans ce genre de cas. Spoiler alert : ils n’ont pas réussi à avancer. Pourquoi ? Une corruption complète du serveur git sur le repo, rendant les clients corrompus, rendant Alexandre fou^^ Mais ce qui est bien, deuxième spoiler alert, c’est qu’on a passé la coupe à avoir des serveurs git corrompus^^ Et ça, j’peux vous assurer que ça fait mal !
Bref, il est 4h, on décolle. 1 minibus rempli de tout le matériel et de 7 personnes, 1 voiture remplie des robots (ouai, je leur faisais carrément pas confiance !), du président et du secrétaire. Comme ça, si jamais le minibus se plante, on peut toujours faire la coupe^^ (c’est horrible, mais ça nous a quand même traversé l’esprit). Soit dit en passant, avec un départ à 4h, il faisait encore nuit, il n’empêche qu’en arrivant sur Paris vers 5h, il y avait quand même du monde ! Genre les gens ont que ça à foutre le matin à 5h que de prendre leur voiture !!!
Bref, voyage sans encombre, on a fait une petite pause dans une aire d’autoroute proche d’un patelin paumé qui a rendu Gauthier euphorique. Non pas que ça soit compliqué de rendre Gauthier euphorique, mais pour le coup, avec nos têtes de déterrés, c’était assez comique^^ Du coup, on est arrivé à La-Roche-sur-Yon avant l’ouverture officielle, donc on était plus qu’à l’heure !
Première étape en arrivant : aller embêter Vitibot qui était un peu en galère pour décharger Bakus de la remorque^^ Ceci fait, les deux conducteurs sont allés se reposer un peu (la route, c’est fatiguant, surtout quand on n’a pas beaucoup dormis les jours précédents) pendant que le reste de l’équipe s’est chargée de l’inscription et du stand. On s’était arrangé avec l’UTT et l’UTBM pour avoir nos stands dans le même coin, histoire de faire un spot pour les UTs. Ce qui était une bonne idée au final.
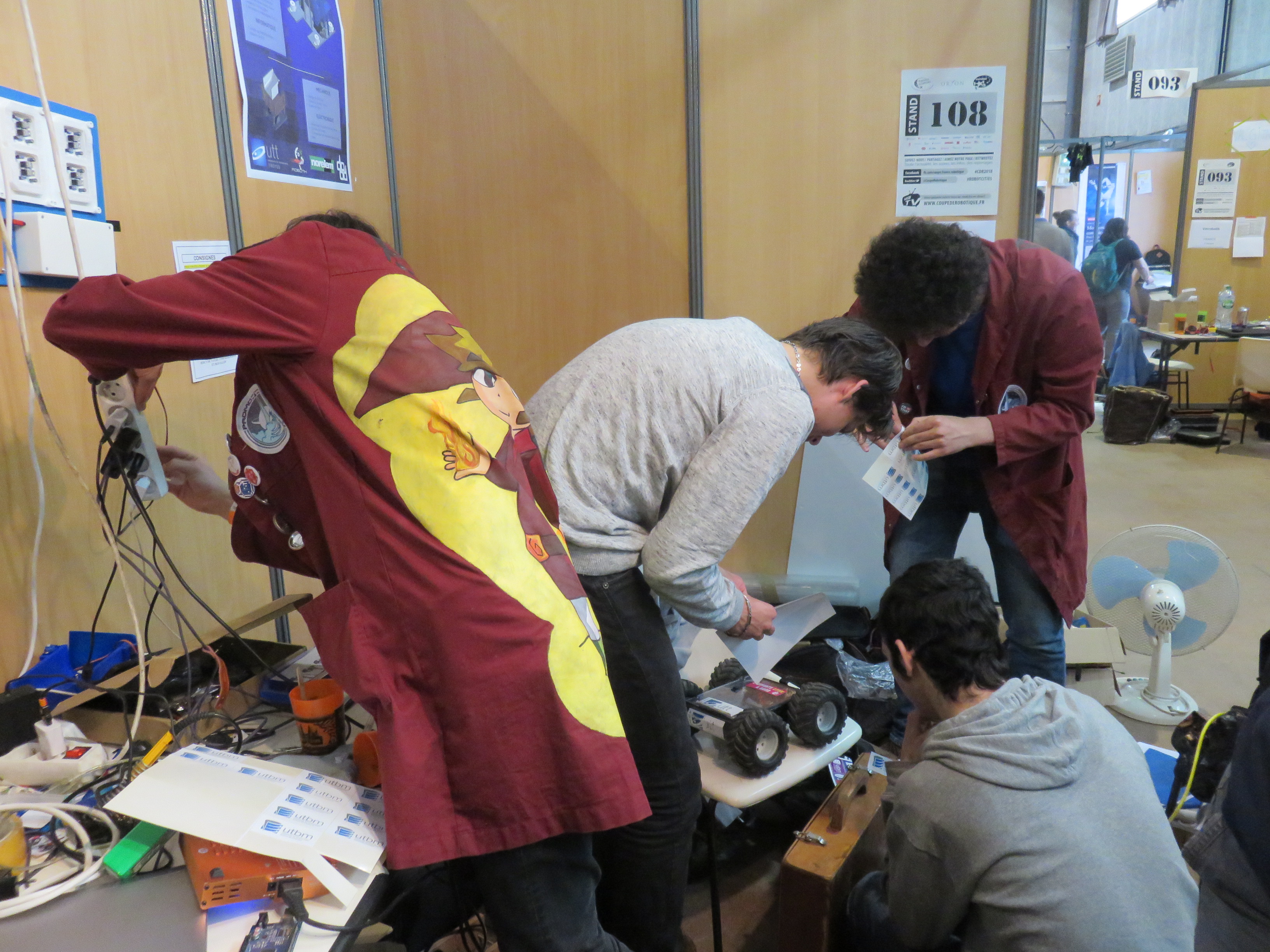
Du coup, avant de commencer quoique ça soit, l’heure était à l’installation sur le stand. Et un stand, c’est petit, on avait pas mal de bordel, on était nombreux, bref, c’était la merde. La preuve en image :

Ça chôme pas sur le stand
On peut aussi voir que tout le monde est déjà au taquet à peine arrivés ! D’un autre côté c’est normal, en arrivant, aucun de nos deux robots n’était homologable, ni statiquement, ni dynamiquement. Hein, à l’arrache vous dîtes ? Non, pas du tout, juste à l’utcéenne Bref, le petit robot ne fonctionnait pas du tout il a donc fallu travailler pas mal dessus alors que le gros robot était trop haut, il a donc fallu le rabaisser, ou plutôt, le rapetisser. Et comment on fait ça vous demandez vous ? C’est simple, il suffit de limer. Beaucoup. Et puis vu que les plaques en bois sont prévues pour s’encastrer via des créneaux, bah, il faut limer des créneaux^^ Concrètement, ça donne ça :

Ça lime dur…
Au final, vu que tout le monde était au taquet (9 personnes, ça fait du monde quand même^^), ça a bien avancé la première journée. On a loupé le premier run des homologations statiques, on est donc allé au second, après 20h. Voilà nos deux bestiaux prêts à parader comme les bijoux technologiques et de haute ingénierie qu’ils sont :
Nos deux robots sont prêts pour l’homologation !
Donc c’est parti !!!!!

Rencontre avec le jury de l’homologation
Perso, j’vois deux choses sur ce début des homologations statiques. L’arbitre à un pur de chez pu système pour garder son écocup à portée de main et les sourires qui illuminent les visages des membres de l’équipe montrent qu’ils sont trop confiants^^ Bon ok, je triche un peu, sachant qu’on a loupé la première homologation statique. What ?! Ouai, moi aussi je pensais que c’est le genre de truc impossible de louper son homologation statique, mais on est comme ça à UTCoupe 8) Souci numéro 1 : le support de balise du gros robot est trop bas d’1 centimètre (faut croire que le gros robot a été trop raboté^^). Souci numéro 2 : le support de balise du petit robot est penché. Bref, fichues balises… Au passage, faut admirer le professionnalisme de l’arbitre, qui fait quand même ça super bien !

Le centimètre qui manque…
Du coup, retour au stand, modification en speed des deux robots parce que l’homologation statique se terminait à 23h, et second run des homologations statiques ! Et cette fois-ci, c’est dans la poche Bon ok, ce ne sont que les homologations statiques, mais quand même !
Après une très longue journée, l’équipe est partie dormir. Enfin, presque toute l’équipe, parce qu’Alexandre a décidé que le gros robot ne fonctionnant toujours pas correctement pour son homologation dynamique, il était hors de question d’aller dormir ! Et là, vous vous demandez sûrement comment on peut enchaîner deux nuits blanches ? La foi mes amis ! Cette ferveur inébranlable en un idéal supérieur : celui d’avoir un f***** robot qui arrive enfin à faire quelque chose. Ça et le fait d’avoir passé toute la route à dormir dans le minibus, ça aide aussi^^
Pendant ce temps, sur le stand de Vitibot…
Arrêtons de parler deux secondes de la coupe, de nos galères, de nos robots et de tout ça et concentrons-nous sur Vitibot. Présents pour faire le show, recruter des stagiaires et, il faut bien l’avouer, se moquer de nous, ils ont monté un stand qui arrache. D’un autre côté, quand la moyenne des robots sur place ne dépasse pas les 30cm de haut et qu’ils se ramènent avec un gros Bakus qui titille le mètre soixante et les quatre mètres de long… Mais bon, toujours est-il que leur stand était idéal pour aller faire une pause et ne plus penser aux tracas quotidiens de nos robots.
Mais le must, ça reste quand même de surprendre le fondateur en train de briquer les roues du robot alors que toute son équipe est juste à côté en train de se tourner les pouces. Si ça c’est pas de l’investissement^^

Le stand de Vitibot
La malédiction continue…
La fin de la première journée sans homologuer dynamiquement un robot signifie qu’on ne participera pas au premier match. Ça mes amis, c’est devenu une constante dans l’association depuis au moins la coupe de 2013. Pourquoi, je ne sais pas (enfin si, j’ai ma petite idée là-dessus en fait^^), mais systématiquement, on loupe le premier match. C’est même arrivé en 2014 où on a terminé 16ème et en 2015 où on a terminé 5ème. Une vraie malédiction et le plan cette année, c’était de rompre la malédiction, parce que mine de rien, quelques jours avant la coupe, on avait jamais été aussi avancé (on avait un robot qui faisait des points en février !!!).
Ya rien d’autre à dire à propos de cette histoire, c’est juste que j’y pensais, j’me suis dit qu’il fallait que j’écrive quelques mots à ce sujet Bref, va, lecteur, lire nos aventures de la première journée !
10/05/2018 : Jour 1 : homologations et premier match
Première vraie journée à la coupe et lancement officiel de la compétition avec les deux premiers matchs. Bref, très grosse journée en perspective ! Et qui commence fort, alors que la majorité de l’équipe est encore en train de dormir, votre serviteur s’est levé au milieu de la nuit (il devait être 3h30 / 4h) pour aller prêter main forte aux courageux restés pour faire homologuer le gros robot. Les premiers mots d’Alexandre en arrivant étaient un truc du genre « ce robot va me rendre fou » (je crois que c’est déjà le cas^^) et « j’ai passé la moitié de la nuit à fixer le serveur git corrompu » (je vous avais dit que cette cochonnerie de problème allait nous hanter durant toute la coupe). Bref, Alexandre était de bonne humeur et le robot n’était pas encore homologable…
Autre fait important, la première journée est composée de deux matchs : le premier le matin et le second l’après-midi. Le premier match, c’est mort. Pour faire le deuxième, il faut être homologué avant midi ! Il nous restait environ 8h, ce qui fait beaucoup et pas beaucoup à la fois :/ Donc on a travaillé comme des brutes, parce qu’au fond, on ne sait rien faire d’autre et on a signé pour en chier et tada !!!

Gros robot homologué !!!
Premier match !
Le gros robot est prêt !!! Homologation dynamique sans problème, robot au taquet, équipe au taquet (ne pas faire attention aux cernes qui commencent à se creuser), bref, taquet complet ! Tous ce qu’on attendait avec impatience, c’est le premier match ! Enfin, pendant ce temps-là, on était toujours en train d’essayer de faire fonctionner ce gentil petit robot qui était résolu à faire de la résistance (jeu de mot à la con qu’il faut que je t’explique parce que tu ne peux pas comprendre, mais le gros souci du petit robot, c’est son électronique, d’où la résistance (oui je sais, c’est nul, mais je m’enfou, je suis le rédacteur, j’écris ce que je veux, na !)).
Bref, premier match, première victoire ! On a gagné 55 à 0. Nos adversaires sont tombés sur la couleur qu’ils n’avaient malheureusement pas eu le temps de tester… Concernant le gros robot, il a réussi à allumer le panneau de domotique, a essayé de faire l’abeille sans succès et ensuite a essayé de faire les cubes, sans succès non plus. Donc 35 points pour le panneau et 20 points parce qu’on a réussi à donner le nombre de points que le robot allait faire (merci le scotch pas jolie sur le haut du robot^^).

Ce robot au taquet !
Ah, il faut aussi que je vous montre comment on a réussi à choper les 20 points pour avoir annoncé le bon score. Nouveauté dans le règlement cette année, le robot doit afficher, en fin de match, le score qu’il pense avoir fait. Selon le score et la différence entre le score affiché et le score réel, ça rajoute un bonus (souvent non négligeable). A la base, c’est notre petit module de démarrage du robot qui devait afficher le score. Sauf qu’on n’a plus trop pensé à ça (il y avait pas mal d’autres problèmes plus urgents^^). Et en attendant de faire le match, je ne sais plus comment, mais l’idée nous est venue que le robot n’était pas capable d’afficher ses points… Solution de repli et légèrement à l’arrache : inscrire le score en dur sur le robot, via du scotch. Eh bah on l’a fait, c’était le bon score, on a eu 20 points gratos !

35 points !
Objectif homologation du petit robot !
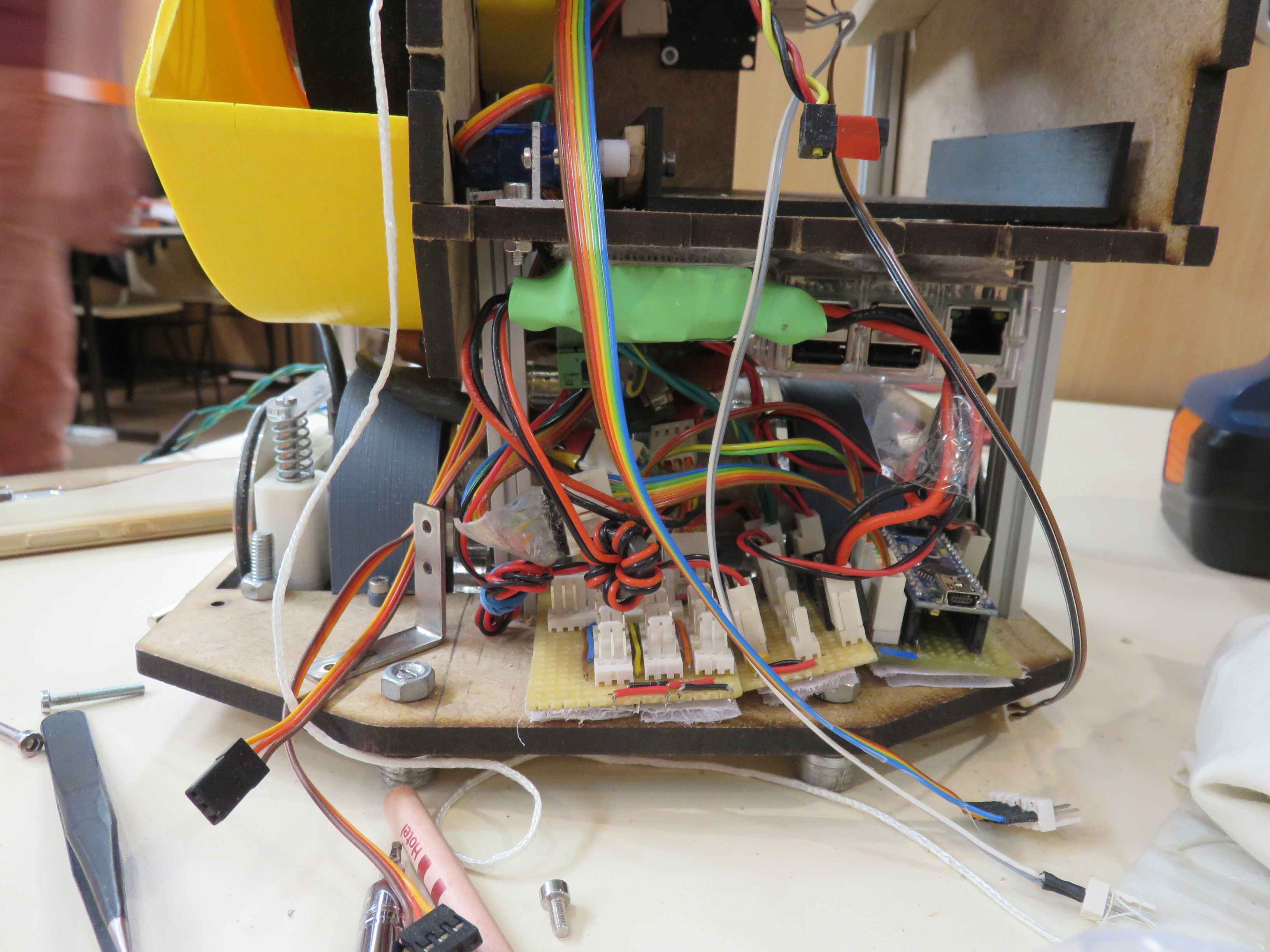
Ah le petit robot ! Je pourrais lui dédier un article à lui tout seul, même deux : un avant la coupe et un autre après la coupe. Mais je vais me contenter de terminer cet article et après je prendrai ma retraite, parce que bon, écrire autant, ça prend du temps mine de rien… Pour en revenir au sujet initial, quels sont les problèmes ? Ils sont tous ! Mais vraiment tous, il n’y a rien qui fonctionne correctement sur ce robot, qui a eu la chance d’avoir une informatique testée durant tout le semestre :/
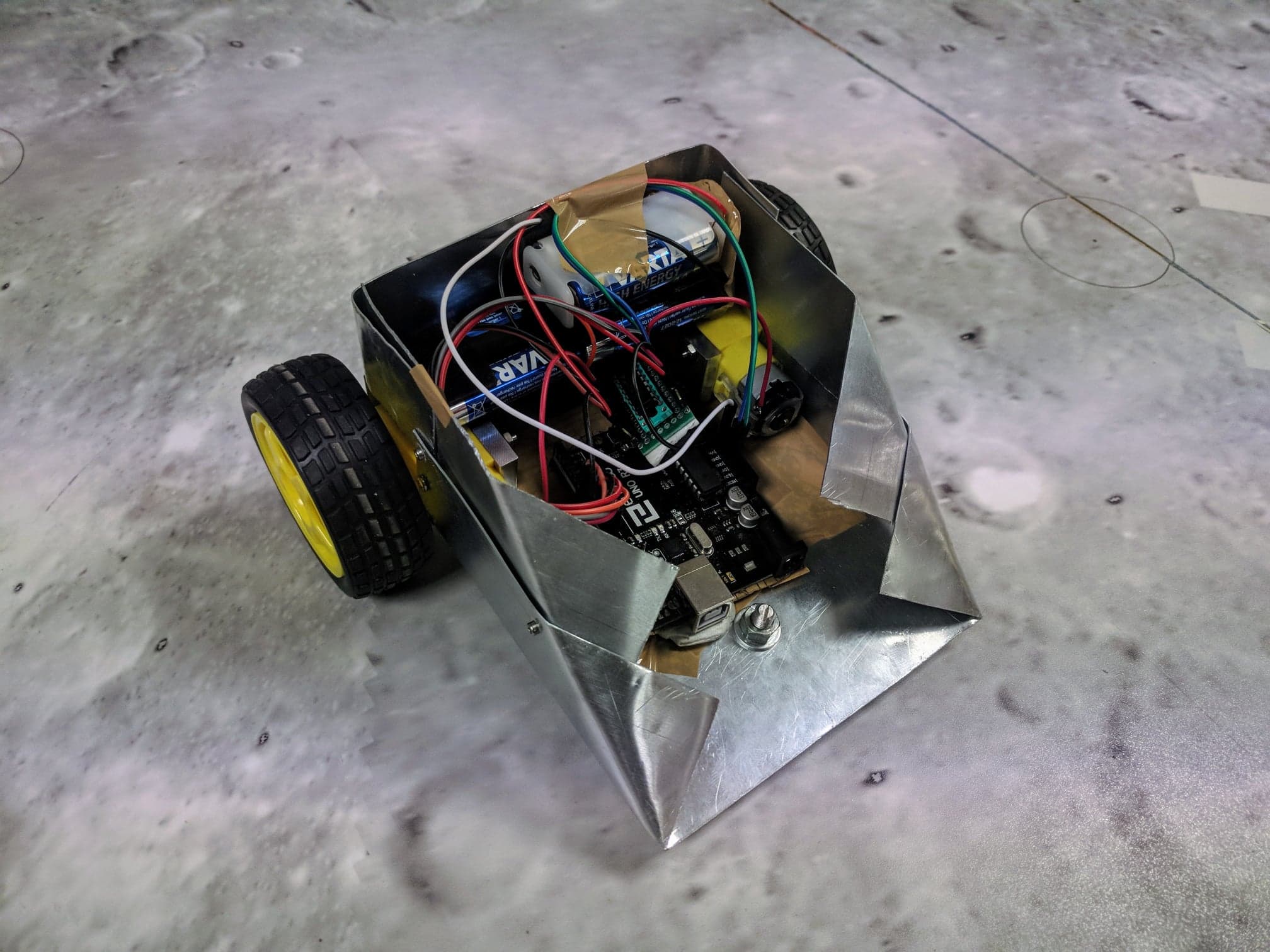
Bref, le premier problème, il est là :
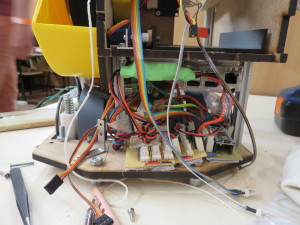
Un bordel d’électronique…
Je vous ai déjà parlé des soucis qu’on a eu sur les super nouveaux connecteurs sertis badass qu’on a acheté ? Eh bah, on en a changé une bonne partie sur le petit robot parce que pas mal de cosses ont lâchées. Et puis pas du petit problème, une cosse sectionnée mais qui reste dedans, ça fonctionne parfois, une horreur pour le débug… L’autre problème était lié à un souci magique qui faisait que le capteur utilisé pour asservir la roue du canon faisait planter le robot de façon random (coupure électrique durant une seconde, ce qui était suffisant pour faire rebooter la Raspberry Pi). Bref, on a cherché, lutté, pleuré, et j’en passe, pour trouver et résoudre les soucis. Ça c’est même terminé de façon assez cocasse…

ET téléphone maison…
Alors non, je ne suis pas fou (enfin pas complètement). Il faut juste se remettre dans le contexte. Peu de sommeil, il devait commencer à faire nuit, j’ai passé une journée à debugger l’électronique et le point le plus important c’est qu’il y avait beaucoup de bruit ambiant ! Le multimètre étant en fin de vie, le bip était très faible. Pour l’entendre, pas d’autre choix que de coller sa tête au multimètre. Bref, c’était compliqué !
Vers la fin de la journée (genre, 22h30), on commençait à être confiant pour homologuer le robot. Souci : les homologations étaient en cours de fermeture… Et sans homologation ce soir, pas de match pour le petit robot demain… Là, on était vraiment déprimés… Et c’est là qu’une licorne est arrivée Désolé d’ailleurs, j’étais tellement ébloui par sa beauté que je n’ai pas pensé à prendre de photo. Et non, je ne suis pas en train de délirer, un arbitre, déguisé en licorne, est venu à notre stand en nous demandant de lui montrer notre petit robot pour l’homologuer.
L’homologation dynamique s’est donc déroulée sur notre stand, au sol, complètement à l’arrache. Mais l’arbitre a été cool (de toute façon, le robot était prêt !) et il nous a finalement homologué le robot !!! UTCoupe est de nouveau dans la plaaaaaaaaaaaaaaaaaace !

Les deux robots sont enfin homologués !
Sachant que petit détail, Vitibot était venu nous faire pour nous proposer de venir déguster un barbeuk chez eux. Il était 19h. On leur a dit on se dépêche d’homologuer le petit robot et on arrive. Le robot était homologué à 23h… Du coup, on y est quand même allé ! Parce que bon, au milieu de la coupe, profiter d’un bon repas (solide) et d’une bonne ambiance, c’est vital pour éviter qu’on devienne tous fou, tant pis si ça rogne sur le temps de sommeil (paraît que dormir c’est pour les faibles). Bref, là non plus, pas de photo, mais encore un immense merci à Vitibot pour l’invitation, pour le barbeuk, pour la soirée (bien que courte).
Avec toutes ces émotions, difficile d’aller se coucher. *se prend une baffe* Dans l’état actuel des choses, même la troisième guerre mondiale ne pourrait pas nous empêcher d’aller dormir^^ Enfin, pas pour tout le monde… Le petit robot a été homologué, mais au niveau des points qu’il rapporte, c’était pas encore ça… J’ai donc décidé de décaler légèrement mes 4h de sommeil quotidien à un peu plus tard, pour passer la nuit sur le robot et m’assurer qu’à son premier match le lendemain matin, il puisse faire au moins aussi bien que toutes les vidéos de test qu’on a du petit robot. C’est dons une bien longue nuit qui commence…
11/05/2018 : Jour 2 : 2 matchs et un robot en plus
La journée commence donc par un début qui n’en est pas un. En effet, est-ce qu’on peut vraiment parler d’une journée qui commence sans avoir dormis ? Ou est-ce que toute journée commence systématiquement à 00h01 ? C’est là une question philosophique dont je te laisse le soin de répondre lecteur, quant à moi, je dirai juste qu’on était 3 à revenir du barbeuk dans l’idée de faire fonctionner correctement ce maudit petit robot !
Je ne me souviens plus trop à quel point la nuit fut déprimante, mais il me semble qu’on a réussi à aboutir à quelque chose de plus ou moins fonctionnel, avec quelques petits soucis de dernière minute à régler par l’équipe une fois qu’elle sera arrivée. Bref, c’était plutôt productif, enfin, me semble. Oui parce que pour rappel, il s’agit du troisième jour sur place, les notions de sommeil et de productivité sont, à ce moment-là, complètement abstraite. Le seul truc qui reste en tête, c’est les robots et les nombreux problèmes qu’ils ont encore^^
L’équipe arrive : dodo time !
Vers 8h30, le Saint Graal arrive enfin ! Non, il ne s’agit pas du petit déjeuner tant mérité, mais de la deuxième partie de l’équipe, avec leurs têtes de déterrés bien qu’ils ont eu le droit à une nuit quasi complète de sommeil ! On leur dit ce qu’on a réussi à faire, à ne pas faire, ce qu’ils doivent faire tout de suite et surtout, qu’ils se tiennent prêt pour notre deuxième match ! Avec toutes ces instructions, ça devrait le faire, il est temps d’aller au lit pour faire une petite sieste de 4h. Dommage, on ne pourra pas assister au match, mais bon, il fallait choisir.
Deuxième match
Alors là, étant en train de compter les moutons (promis, je n’ai pas compté longtemps, avec le manque de sommeil accumulé, je peux vous assurer qu’en deux secondes chrono vous dormez, vous n’avez même pas le temps de dire dodo !), je ne peux pas vous conter l’épopée de notre deuxième match, qui est le premier avec nos deux robots. Tout ce que je peux vous dire, c’est que personne n’a jugé utile de nous prévenir par sms du résultat et en arrivant sur place, vers midi…
On va dire que c’est le moment de rupture, où tout le stress accumulé est libéré d’un coup. J’demande comment ça été le match et j’ai pour seul réponse qu’un fou rire général. Vu mon état et en ayant la tête dans le fondement, j’ai pas compris. Mais vraiment pas… Et puis là, je ne sais plus qui dit juste « on a fait 0 points ». Et là, bah j’me suis mis à rire aussi^^ Une belle brochette de dégénérés quoi^^
Alors, pour la petite histoire, parce que j’ai quand même eu les détails. Le gros robot, le seul robot fiable et construit la veille de la coupe, a eu un souci avec son interface de démarrage. Résultat : impossible de le lancer (c’était juste un câble qui s’est débranché, mais bon, pas le temps de corriger le problème avant de lancer le match). Erreur regrettable, mais où on ne pouvait pas faire grand-chose. Quant au petit robot qui s’est fait bichonner toute la nuit, il n’avait aucun problème technique. L’erreur était purement humaine, à l’installation ils ont oublié de désactiver le bouton d’arrêt d’urgence… Donc le robot ne pouvait pas rouler… Bref, échec total^^
Mais bon, ça aussi ça fait partie du jeu, pas de problème. On s’est posé sereinement en attendant le deuxième match de la journée. Entre temps on a quand même rédigé la todo list de l’installation pour éviter que le souci d’arrêt d’urgence ne se reproduise.
Ps : il est aussi important de préciser qu’en restant bosser toute la nuit et en allant me coucher quelques heures pour revenir vers midi, je suis arrivé sur place avant la moitié de l’équipe de Vitibot avec qui on avait passé la soirée… De vrais touristes j’vous dis !
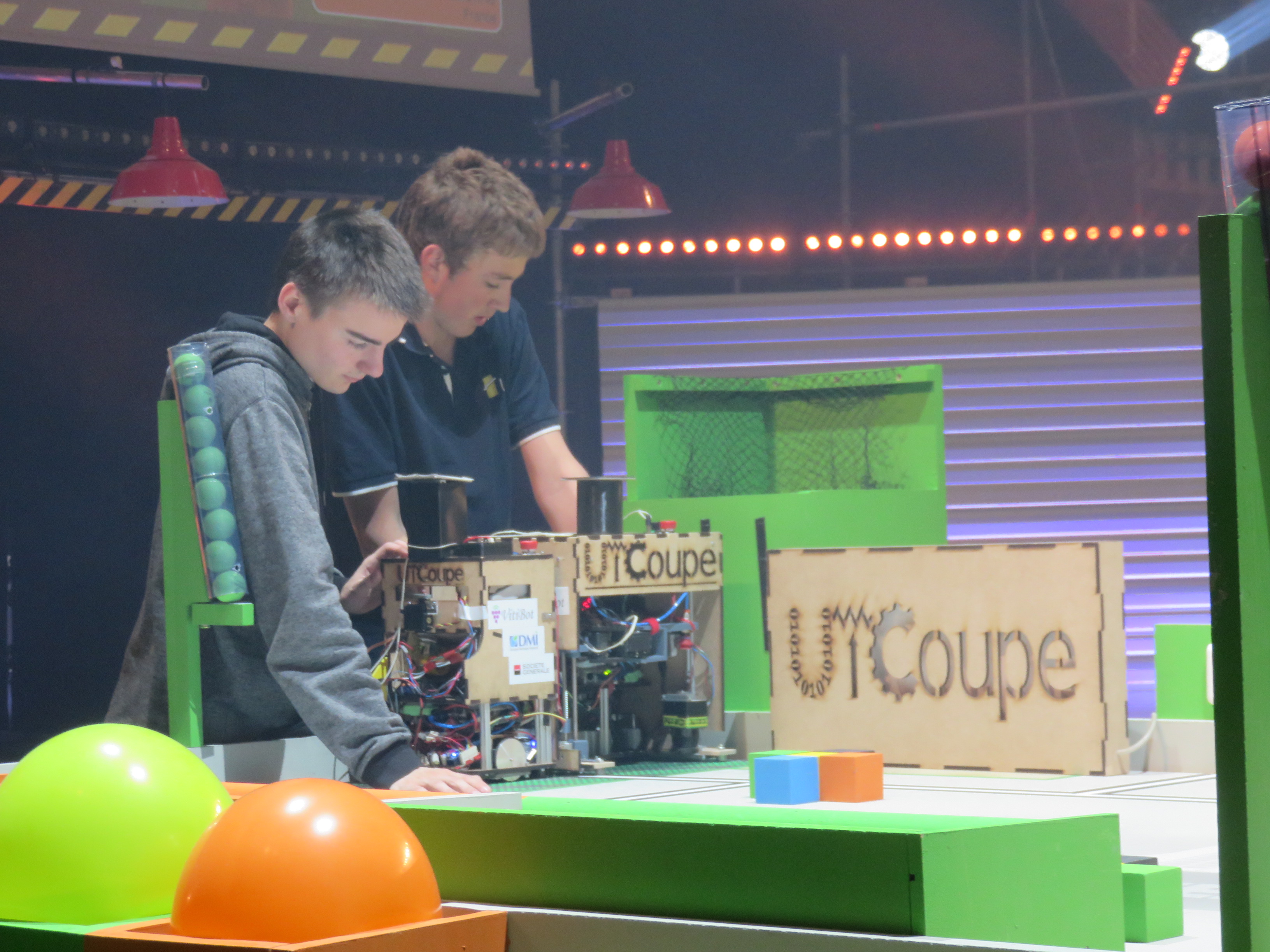
Troisième match
Courant de l’après-midi, it’s time ! Deuxième match du jour, troisième match pour nous, on est grave sereins ! Installation oklm :

Paré pour le troisième match !
Et alors là, c’est l’orgie complète ! Le gros robot sort de sa zone de départ (ok, ça c’est déjà arrivé) et va appuyer sur le bouton pour allumer le panneau de domotique (on a déjà réussi, cf premier match). Pendant ce temps, le petit robot sort de la zone de départ (amaziiiiing !!!!!) et va s’encastrer contre un distributeur (ça c’est prévu). Il l’ouvre, mais il s’arrête là (ça c’était pas prévu…). Le gros robot tente pour la deuxième fois de pousser l’abeille et il y arrive enfin ! Boum, le ballon explose et nos yeux se mettent à briller de mille feux !!! Bon après le robot essaye de pousser des cubes mais c’est l’échec…

105 points dans la poche !
On termine quand même le match sur une victoire, avec 105 points sur le match ! Et on est encore loin de ce que les robots sont capables de faire en théorie, ne petit robot n’ayant pas tiré la moindre balle…
Mais on est quand même super contents de notre coup Après 3 jours sur place, on commence enfin à faire des choses, il était temps !
Une décision à prendre…
Le vendredi soir à la coupe, c’est un moment spécial. En effet, 4 matchs sont déjà passés, il n’en reste plus qu’un le samedi matin pour terminer la phase de poule. Mais c’est surtout spécial parce que c’est le vendredi soir qu’il y a la coupe off, l’événement sûrement le plus fun de la coupe. La coupe off, c’est le moment où on arrête de penser matchs et où on pense « quels sont les trucs les plus ridicules et marrants qu’on peut faire avec les robots ». Ça se termine souvent en concours de lancé de balles, le robot qui va le plus vite, ce genre de choses. Le tout à grand renfort de bière et du barbeuk gratos organisé chaque année par l’équipe Evolutek. Bref, grosse ambiance le vendredi soir, l’idée c’est généralement de s’amuser et de ne plus penser aux robots.
Sauf que nous, on est UTCoupe. En tant qu’étudiants de l’UTC qui se respectent, se pose la terrible question : est-ce qu’on améliore encore nos robots pour faire plus de points ou est-ce qu’on laisse les choses comme elles sont et on en profite un peu ? Pour avoir souvent privilégié la première option, j’aurais bien voulu tester la deuxième. Mais la majorité a parlé, j’vous laisse deviner l’option choisie…
L’idée sur le gros robot était de vérifier qu’il est bien en mesure de pousser correctement les cubes. En effet, avec notre super système d’anti-collisions, le robot n’était pas capable de pousser des cubes, pensant qu’il s’agissait d’une collision. Le système s’est transformé d’un truc complexe qui peut gérer plein de choses à un truc à l’arrache qui by-pass une bonne partie des éléments développés au cours du semestre. Mais bon, il faut ce qu’il faut pour faire des points !
Quant au petit robot, l’échec de récupération des balles du distributeur nous a laissé à penser qu’il y avait pas mal d’autres choses qui ne fonctionnaient pas correctement. Il était donc important d’y passer pas mal de temps et quitte à essayer de faire les choses de façon fiable, on a abandonné le tir des balles au canon (vous savez, le truc qui fonctionnait super bien pendant le semestre et où on a montré au moins 5 vidéos parce qu’on était trop fiers…) et on a modifié le robot pour qu’il fasse la dépose directe des balles dans la station d’épuration. En cours de route et après de nombreux tests, on a enfin compris ce qui clochait au niveau du robot et notamment sur ses déplacements : la base roulante avait été montée un poil trop haut, les roues touchaient très peu le sol, bref, un très gros manque d’adhérence. Et ça, c’est le genre de problème qu’on avait depuis le début mais qui ne pouvait pas être un problème parce que la base roulante avait toujours été fiable et correctement montée…
Bref, à une heure avancée de la nuit, se pose la fatidique question de savoir qui va dormir et qui est assez courageux pour rester et faire une nuit blanche la dernière nuit. La question s’est posée pour tout le monde, sauf pour les deux conducteurs (j’suis trop chanceux ), qui devaient aller dormir pour récupérer un peu de sommeil (Compiègne – La-Roche-sur-Yon c’est quand même 5h/6h de route). Une partie de l’équipe méca est resté pour corriger le problème de base roulante du petit robot et quelques soucis avec le gros robot. Toute l’équipe info est allée dormir il me semble.
12/05/2018 : Jour 3 : dernier match et bakus fait son show
Dernier jour, dernier match, dernier réveil pénible, bref, c’est la journée des derniers tout ce qu’on veut. Le réveil a quand même était un poil compliqué, la nuit fut à nouveau courte et le stress était de mise. Parce que c’est pas l’tout mais le dernier match, il est aujourd’hui, enfin dans quelques heures et la veille les robots étaient loin d’être complètement prêts.
N’empêche qu’en arrivant les divers soucis mécaniques avaient été corrigés, on a pu faire pas mal de tests pour s’assurer que les robots allaient faire le match de leur vie. Et on était sacrément confiants faut dire !
Dernier match !
L’annonce du dernier match se fait entendre, on part dans les backstage. Au passage, je crois que c’est cette fois-ci qu’on a oublié d’emmené les batteries des robots, qui étaient en cours de charge. Bref, un petit coup de stress, histoire de stimuler tout le monde^^
Notre dernier match était contre l’équipe LPO : le Lycée Les Lombards. Si je vous donne le nom de notre adversaire, c’est parce que l’équipe LPO est composée exclusivement de lycéens (eux ils ont grave la classe de faire la coupe avec les grands !) et parce qu’il s’agit d’un lycée de la ville de Troyes, qui est venu avec l’équipe de l’UTT, que nous connaissons très bien. En plus de ça, c’est eux qui ont emmené la table de jeu que nous avons allègrement squatté pour nos tests. Bref, c’est de la famille ! Du coup on était pas mal content de les affronter, ça faisait un dernier match super cool.
Confiants comme tout, on s’installe tranquillement.

Installation pour le dernier match
Petite note au lecteur attentif : si tu regardes attentivement les photos, tu peux constater que notre abeille a changée plusieurs fois de tête, notamment au niveau des pates avant. D’abord très jolies et en découpe laser, elles ont cassées à la première chute. La solution rapide de remplacement a été des bouts de bois particulièrement moche, en attendant d’avoir une version imprimée en 3D, qu’on peut voir sur la photo juste au-dessus.
Et on est prêt pour le match !
Conforme à nos attentes, les deux robots sortent de la zone de départ. Le gros robot allume le panneau de domotique (on savait déjà faire), pendant que le petit traverse la table à toute vitesse pour récupérer le distributeur du côté adverse. Le gros robot enchaîne en se dirigeant vers l’abeille, il arme son bras et… Il la frôle, plutôt que de descendre la rampe, l’abeille décide de tomber au sol et paf, ça fait des chocapics (traduction : l’abeille est hs…). Ça fait mal… Le petit robot quant à lui galère un peu pour sortir du distributeur et au même moment, le robot adverse vient dans la zone pour taper son abeille. Problème : notre robot est devant. Le robot adverse s’arrête, notre robot n’a pas assez de place pour montrer ses talents d’évitement, donc il se bloque lui aussi. Pendant ce temps, le gros arrive quand même à pousser quelques cubes.
Au final, on gagne le match en ayant marqué 65 points, mais en étant dépités. D’une part parce que nos robots étaient vraiment capable de faire mieux et que l’abeille c’est vraiment un coup à pas de chance, mais surtout parce que le blocage involontaire de notre adversaire à fait qu’il n’a pas pu faire beaucoup de points. Et bien qu’il s’agisse d’un adversaire du match, on est dégoûté qu’ils aient pas pu faire mieux à cause de nous…
Bon après, cette histoire arrange grandement l’équipe de l’UTT qui, grâce à nous, se classe devant le lycée Les Lombart et gagne ainsi leur pari. Comme quoi, nos soucis auront au moins arrangé quelqu’un^^
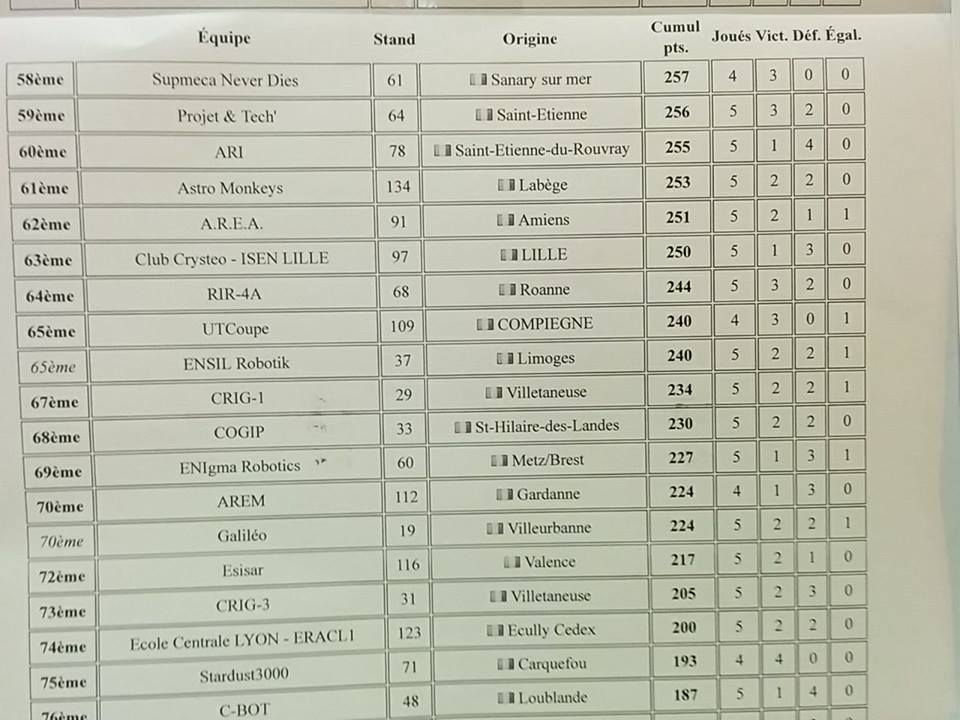
Dernier match terminé, c’est l’heure des comptes !
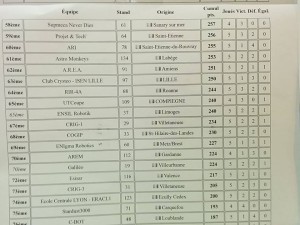
Le classement final !
On termine donc la coupe à la 65ème place. C’est loin de ce qu’on avait prévu, c’est cohérent par rapport à l’état des robots en arrivant et c’est quand même deux fois mieux que l’an dernier (certes, c’est pas une référence). Bref, on est quand même content, mais on aurait largement pu faire mieux :/ Mais c’est ainsi que fonctionne la coupe ! Et puis c’est pas grave, le plus intéressant, c’est d’aller regarder les phases finales !
Les phases finales
Je ne vais pas m’étendre sur les phases finales, c’était cool, RCVA n’a pas gagné, on a vu du beau jeu, de beaux robots, bref, c’était cool, belle ambiance. Le truc ouf qui est arrivé pour la première fois, c’est le robot de 4 tonnes qui fait son show^^ Je parle bien évidemment du Bakus de Vitibot.

Bakus fait son show !
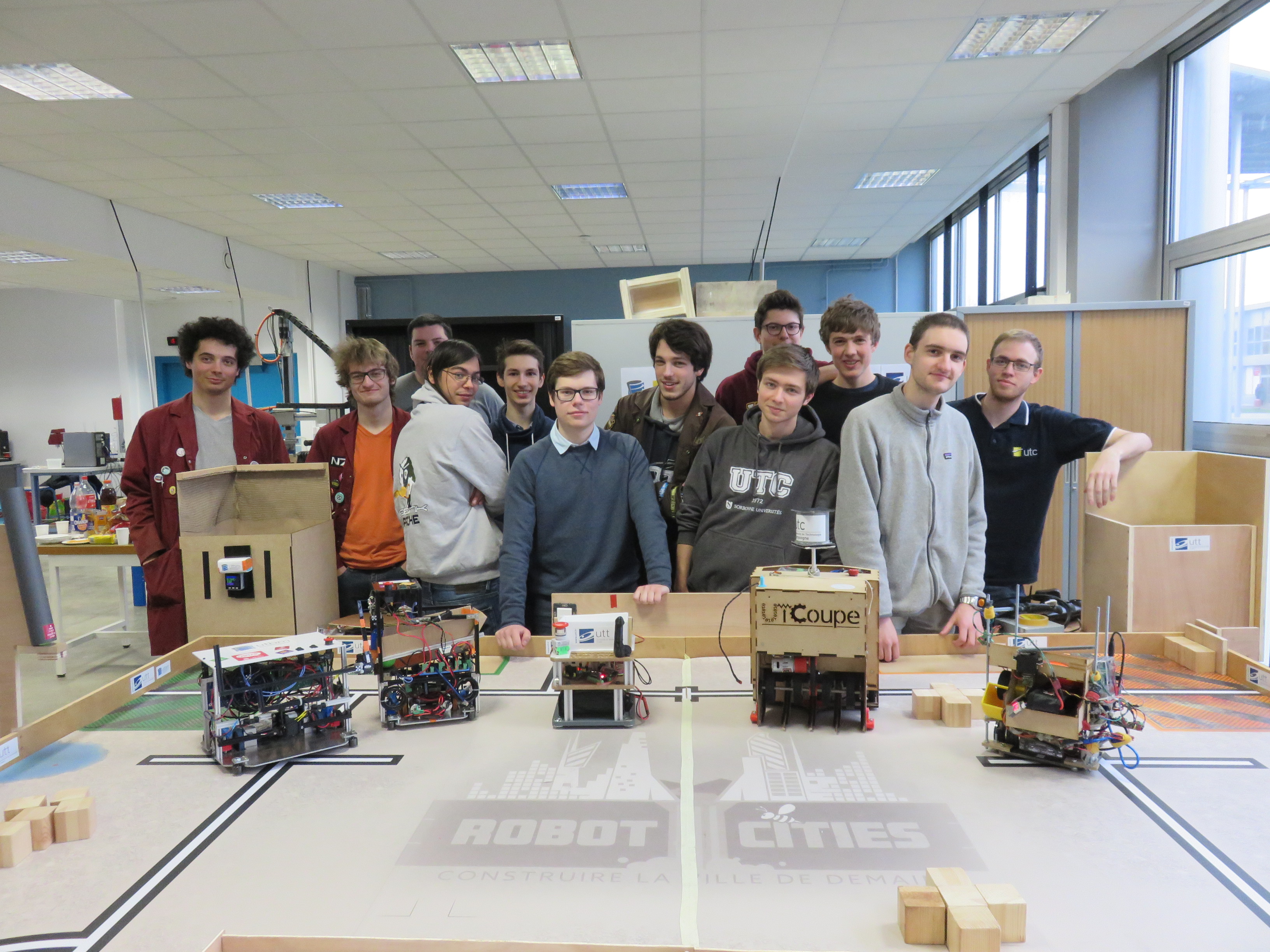
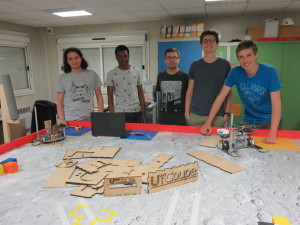
La famille c’est important
Et enfin, que serait une coupe de France de robotique sans la traditionnelle photo de famille ? La première, c’est vive l’UTC. UTCoupe est présente, bien évidemment, ainsi que Vitibot (il y a pas mal d’anciens d’UTCoupe là-bas) et WeR’Droïd, l’équipe des anciens de l’UTC.

L’UTC est dans la place !
La deuxième, c’est avec nos potos des autres UTs, Robotik’UTT et Unitec, le club de l’UTBM.

Les UTs sont lààààà !!!!
Et parce que j’suis méchant et j’aime bien embêter les autres, une petite dernière !

Pris en flagrant délit…
Celle-là mérite quelques explications. Il y a une ancienne coutume qui veut que durant la coupe, les équipes des 3 UTs se trollent mutuellement en collant des stickers de son école sur les affaires des autres. L’UTBM reste la championne incontestée de cet exercice et l’an dernier, on en avait pas mal souffert. Cette année, on a pris les devants, mais surtout, on a pris une preuve. La preuve, c’est la photo juste au-dessus où la majorité des membres de l’équipe de l’UTBM sont en train de mettre des autocollants sur pas mal d’affaires de l’UTT. Je suis personnellement assez fier d’avoir pu les aider tout en prenant une photo à leur insu^^
Retour au bercail
Après les dernières photos, le cocktail de fin de fin de la coupe, un petit coup de stress à cause du drapeau perdu de l’UTC, on a pu ranger nos affaires tranquillement, charger le minibus et être parés au départ. L’UTT et l’UTBM ont fait le choix de rester sur place un jour de plus, ce qui est un choix censé, mais bon. Et quand il était l’heure d’y aller, ya deux problèmes : il pleut vraiment beaucoup, ce qui est toujours chiant, mais surtout, après avoir vidé le dortoir, Alexandre ne trouve plus son téléphone… Deuxième coup de stress, heureusement qu’il l’avait oublié dans la voiture…
Bref, on approche des 19h, on va faire un tour au KFC afin de se remplir le ventre avec de longues heures de route. Ça se passe sans problème, dans le minibus, l’ambiance est au ronflement général (pauvre François qui était en train de rouler avec 6 endormis^^). On se fait quelques pauses en cours de route, pas de stress. Pas de soucis non plus de sommeil qui nous rattrape, on avait prévu le coup pour être assez reposé. On arrive à Compiègne vers 2h du matin, on décharge tout en bordel dans l’atelier, chacun rentre chez soi et au dodo bien mérité ! Quelle aventure ! (enfin, c’est toujours le bordel comme ça en fait, rien de surprenant^^)
La coupe 2018 : c’est fini 
Bah voilà, la coupe de France de robotique 2018 est terminée. Malheureusement, c’est pas le cas du semestre. Traduction : il va falloir mettre les bouchées doubles pour rattraper le boulot en retard, terminer les projets, réviser les finaux, bref, une vie étudiante tout ce qu’il y a de plus normal !
Merci à nos sponsors !!!
Au passage, merci à tous nos sponsors pour nous avoir fait confiance cette année encore ! Si on peut vivre cette aventure, c’est grâce à vous ! Mention spéciale aux départements du Génie Informatique et d’Ingénierie Mécanique de l’UTC !

Merci à nos partenaires !
Toutes les bonnes choses ont une fin…
Le dernier élément qui m’a motivé pour écrire ce (très) long billet de blog est la fin de ma propre aventure. Après 8 ans à Compiègne (ouai, ça en fait pas mal des années^^) et une quatrième participation à la coupe avec UTCoupe, je tire enfin ma révérence, pour aller explorer des contrées plus vertes (l’Allemagne en fait^^). Un au revoir assurément plus qu’un adieu, il n’empêche que je passe le flambeau, après avoir récupéré un club à l’agonie en 2016. J’espère sincèrement qu’UTCoupe est sur une nouvelle pente ascendante et que les années à venir seront glorieuses
Bref, à la prochaine ! En espérant aussi que le blog continuera d’être alimenté ! Et que toi, lecteur, tu as pris ton pied en lisant ce blog, autant que moi en rédigeant les articles !
Thomas, pour UTCoupe !